ABOUT LEARNER
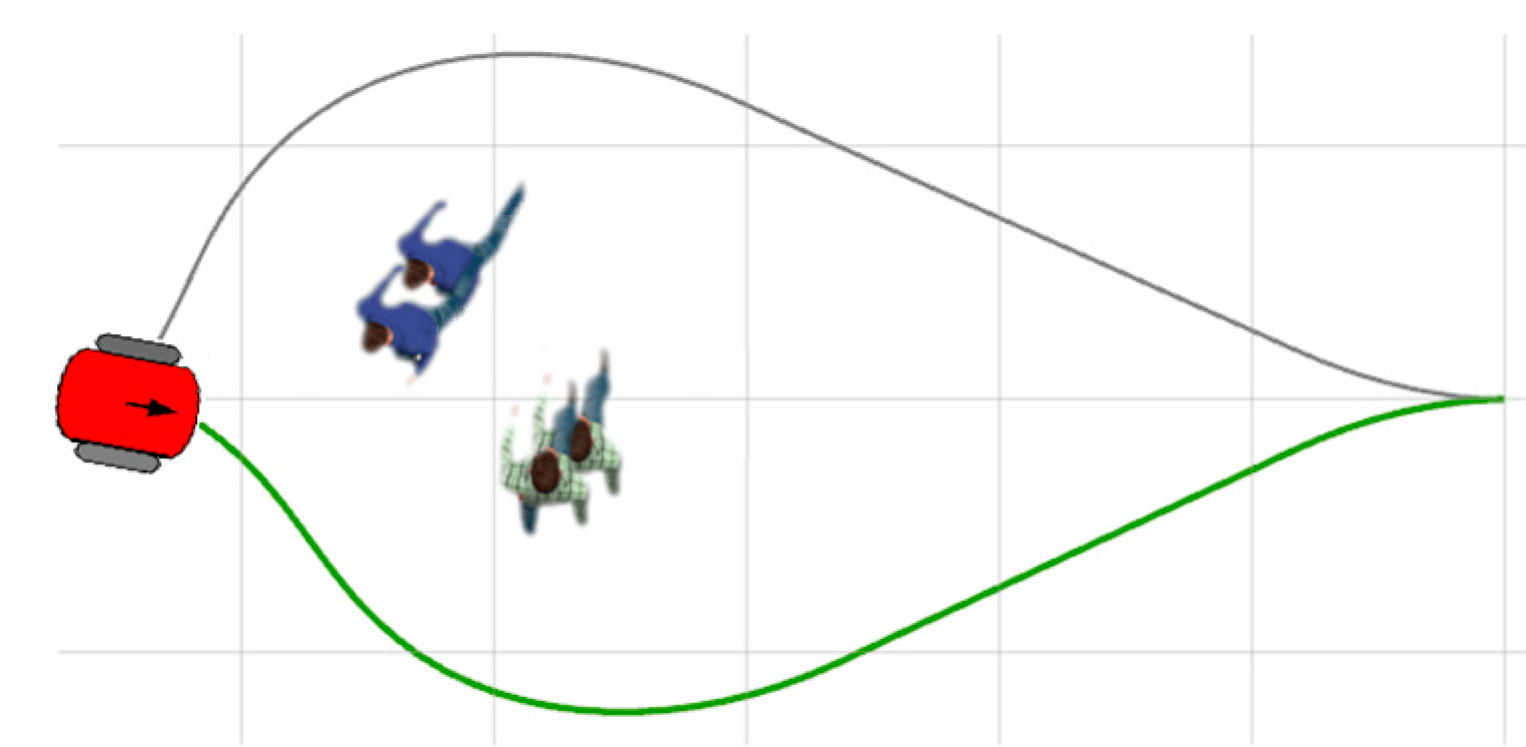
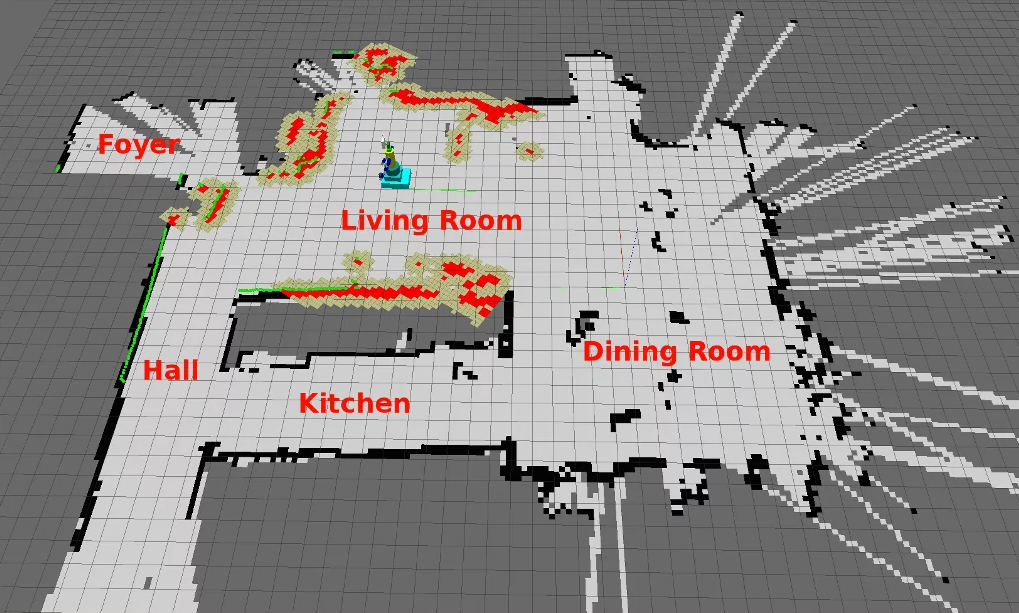
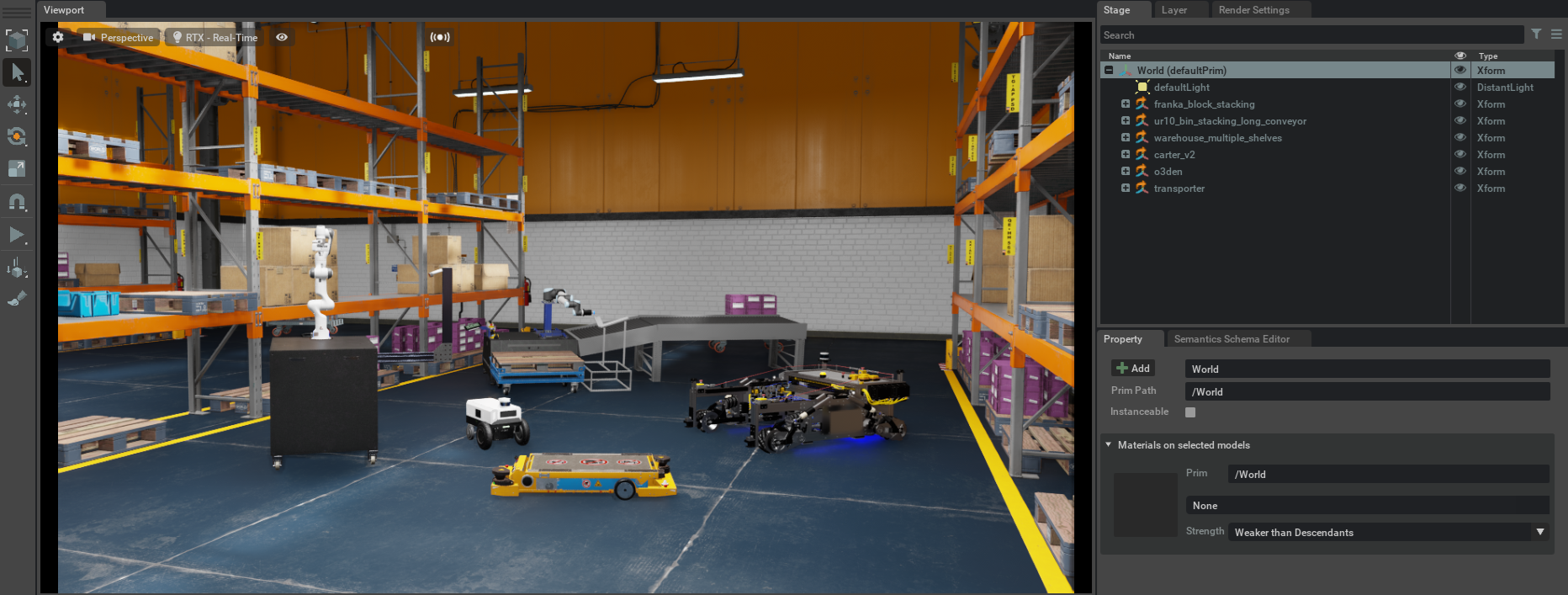
The goal of LEARNER is to expand the applicability of mobile robotic platforms and provide a hybrid solution between model-based and AI-based approaches for addressing current challenges in mobile SLAM and Path Planning, specifically targeting dynamic conditions and constantly changing environments populated by humans