
LEARNER DATASETS
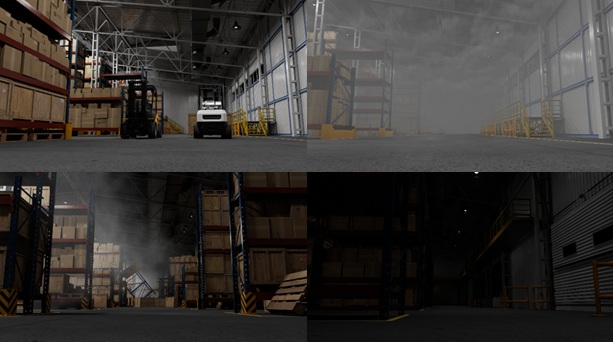

Within LEARNER, the development of the proposed methodologies is heavily based on hyper-realistic synthetic datasets. We make use of Unreal Engine 5 and Nvidia Omniverse to produce representative environments corresponding to office, apartment, and warehouse sites.
Version 1
The first version of our dataset can be found in https://doi.org/10.5281/zenodo.14823070 and contains two virtual environments recorded under different conditions.
Version 2: Accepted at the European Conference on Mobile Robots, 2025
The second version of our dataset can be found in https://doi.org/10.5281/zenodo.15438637 and contains four virtual environments recorded under different conditions with improved lighting settings.
We encourage readers to make use of our produced data for their research and site our project, under the restriction of following the acknowledgment below:
This work is implemented in the framework of H.F.R.I call "Basic research Financing (Horizontal support of all Sciences)" under the National Recovery and Resilience Plan "Greece 2.0" funded by the European Union – NextGenerationEU (H.F.R.I. Project Number: 15339).